Slingshot
A battery-powered sensor pod worn on an upper-arm compression sleeve that turns a training session into data, fusing motion and heart-rate into a single Session Load Score, plus jump count, vertical, and heart-rate intensity zones. As co-founder and EE/firmware lead, one of just two engineers on the team, I own the hardware and embedded systems end to end: schematic capture, PCB layout, fabrication, assembly, and firmware bring-up of a matchbook-sized mixed-signal board.
Most of the engineering difficulty here is coexistence: a 2.4 GHz radio, a switching power supply, and a microvolt-level optical heart-rate front end all have to share one matchbook-sized board without corrupting each other. The design is built around protecting RF range and signal quality while still fitting a full sensor suite, on-board logging, and a complete battery-management chain.
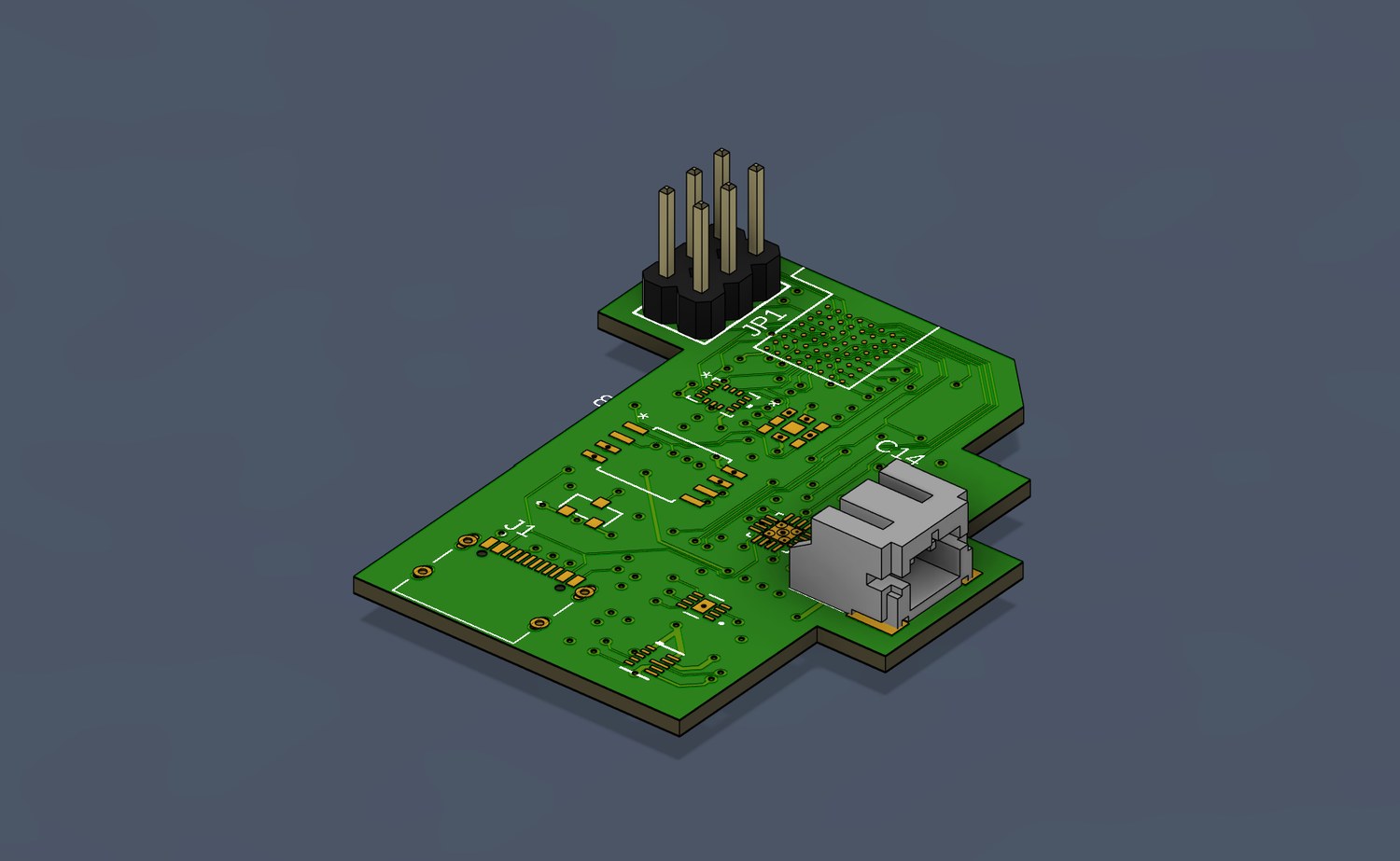
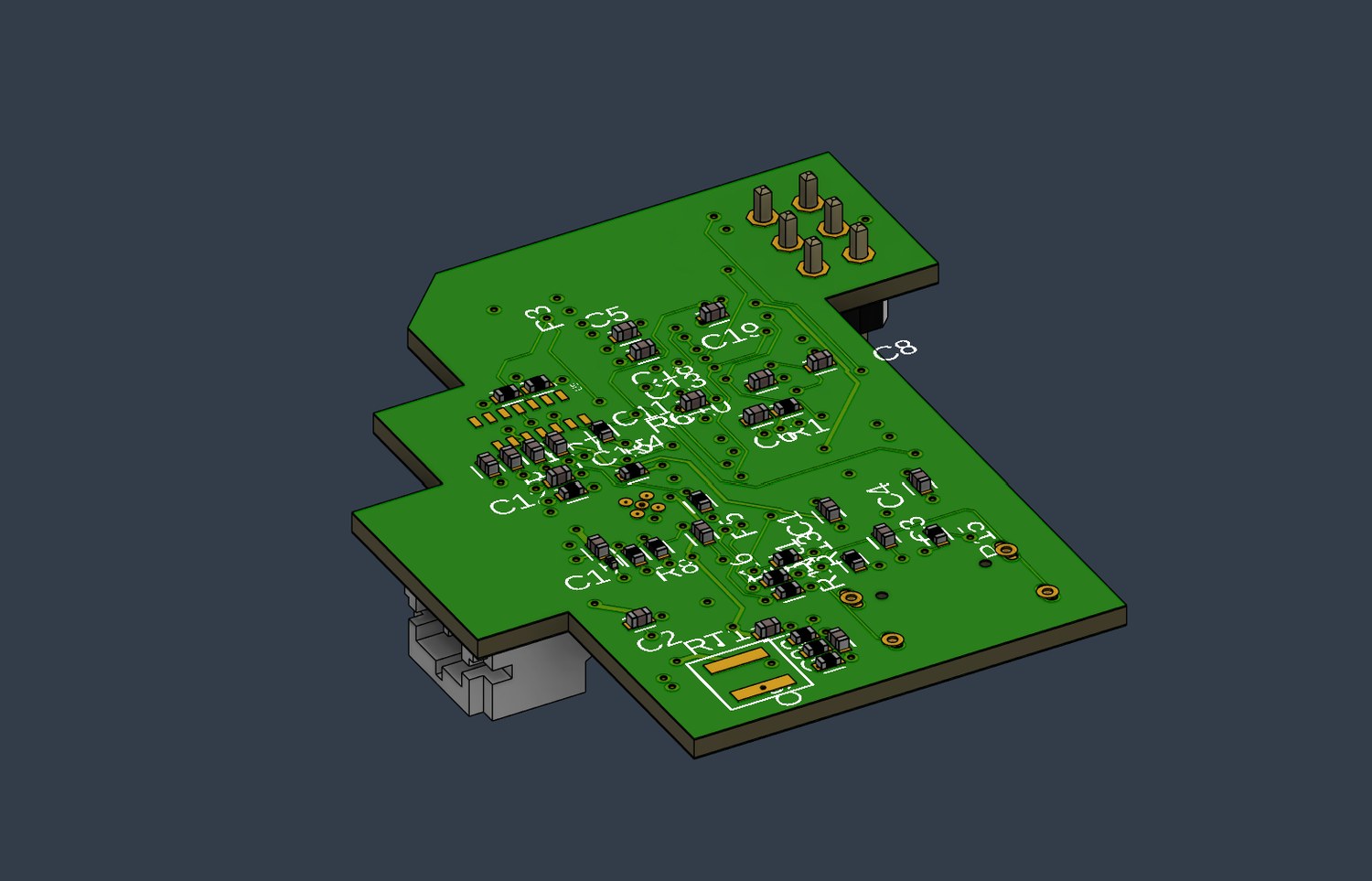
A matchbook-sized 4-layer PCB
3D renders of the fabricated design, top and bottom. (Renders only, schematics, layout, and Gerbers stay in-house.) Tap either to enlarge.
The power tree
USB-C charges a Li-Po through a charger with power-path, and a buck-boost regulator holds a clean 3.3 V rail across the entire battery curve. A fuel gauge on the battery node reports state-of-charge.
Why buck-boost, not an LDO: a single Li-Po swings roughly 3.0–4.2 V, which crosses the 3.3 V output. A buck-boost holds the rail steady across the whole discharge curve where a buck or LDO would sag, a topology choice driven by the battery's behavior, with the switch-node loop kept tight and well away from the radio and the optical front end.
Five-sensor suite
Fused over I²C / SPI / QSPI and read by the nRF52840, which logs to flash and streams telemetry over BLE.
What I own, end to end
Hardware / PCB
- Designed a 4-layer mixed-signal stackup (Top / GND / 3V3 / Bottom) in Fusion Electronics; fabricated & assembled at JLCPCB.
- Managed RF + switching-supply + sensitive-analog coexistence on one matchbook-sized board.
- Owned BOM, sourcing, and DFM, basic vs. extended parts, CPL rotations, JLCPCB rules, and checked board-to-enclosure fit via ECAD↔MCAD.
Power electronics
- Architected the full power tree: BQ24074 → TPS63802 → 3.3 V (+1.8 V), MAX17048 on the battery node.
- Chose buck-boost over an LDO to hold 3.3 V across the whole Li-Po discharge curve.
- Applied switching-layout discipline to protect both RF range and heart-rate signal quality.
Firmware
- Embedded C/C++ on PlatformIO + nRF52 Arduino core for the nRF52840, two build environments (dev kit + custom board).
- One codebase, two data paths: flash logging + USB-CDC dump (v1) and BLE streaming (v2), additive, no rewrite.
- Built a synthetic "demo stream" to validate capture → packetize → stream before sensors were wired; SWD/J-Link via nRF52840-DK.
Design review
- Caught an nRF52840 VDDH/VDD power-mode conflict and a switching-regulator feedback-divider error before fab, both the kind of mistake that kills a board and costs a multi-week respin.
- Routed every datasheet number, pins, registers, electrical limits, to verification rather than memory.
- Built in observability: rail test points and a debug header so a non-booting board isn't a black box.
Beyond the board
The pod is only half the product. I also built the software that turns its data into something a coach can use.